当社グループは、技術開発型企業として研究開発活動を経営基盤の一つに位置付けており、研究開発の役割は魅力ある製品やサービスを創造することによって豊かな社会づくりに貢献することであると考えています。
当社では、将来に向かって社会が必要とするであろうニーズの予見に努め、その仮説に対し、当社がどのような貢献が可能かを検討しながら、研究開発活動を推進しております。
産業界は、常に新たな価値の創造を追い求めており、これまでもこのエネルギーが技術革新をけん引してきました。しかしながら、産業界が求める新たなニーズは必ずしもわかりやすい形で発信されるものばかりではなく、実際にはその多くが潜在的であると当社は考えています。
当社では、このように埋もれがちなニーズを顕在化させるためは、産官学がさらなる交流を深め、企業と大学・公的研究機関のそれぞれが持つ課題や知見が交わり、その成果を世界に発信することが重要であり、これが技術革新の起爆剤になると考えております。
このような考えにもとづき当社では、大学や公的研究機関との連携を積極的に推進し、先端技術に触れることで新たな技術を確立し、より革新性の高いモーションコントロールの提供を目指しております。
東京大学 石川研究室とのロボットハンド研究事例
「大人の指くらいの大きさのハーモニックドライブ®が欲しい!」
 外形13mmの世界最小
外形13mmの世界最小
ハーモニックドライブ® CSF-3
当社は大学との交流の中で、2000年に東京大学の石川正俊教授から「大人の指くらいの大きさ」で、「制御がしやすく」、「高速」かつ「力強い」ロボットハンドが欲しいというニーズをお聞きしました。石川教授は、超高速ビジョンセンサー開発の第一人者で、このセンサーを応用し、高い応答性能もったモーションコントロール技術の研究を進めておりました。
当時、当社の最も小さなハーモニックドライブ®の外径は20mmで、これは大人の指としては大き過ぎたため、直ちに石川教授のニーズを満たす提案はできませんでした。しかし、石川教授の先進的な研究は、今後のモーションコントロールに大きな革新をもたらすという確信と、今後のロボット技術において手や指のアクチュエーターに関わるニーズは高まっていくという仮説のもとに、当社は超小型アクチュエーターの開発に着手しました。
世界最小のハーモニックドライブ®と超小型ACサーボモーターを開発
このようにして始まったロボットハンドの開発でしたが、越えなければならない技術課題が次々に立ちはだかり苦難の連続でした。大人の指を目指して開発に取り組んだハーモニックドライブ®は、部品や歯車があまりに小さ過ぎたため加工も測定も未知の領域の技術と技能が求められました。多くの技術課題に対し、石川教授をはじめ多くの社外の皆様のご支援をいただきながらその一つ一つを解決していきました。
その結果、2001年に外径13mmの世界最小ハーモニックドライブ®とこれに超小型ACサーボモーター、そして当時は非常識と言われた傘歯車を組み合わせた指モジュールを完成することができ、石川研究室に納品しました。
 超小型ACサーボアクチュエーター
超小型ACサーボアクチュエーター
RSF-3
当初1本指だった指モジュールは、その後3本指のロボットハンドへと進化し、落下するボールをつかんだり、ペットボトルのキャップをあけたり、ピンセットを使って1粒の米をつまみあげたりと、より高度なモーションコントロールを実現しています。また、この開発をきっかけにほかの大学や研究機関の研究者との交流も広がっており、ロボットハンド技術は実用化に向けて、日進月歩の進化を遂げています。
その後、世界最小ハーモニックドライブ®搭載ACサーボアクチュエーターは、標準製品として市場投入され、経済産業省が主催する2007年の“ 今年のロボット大賞 ”で中小企業基盤整備機構理事長賞を受賞いたしました。
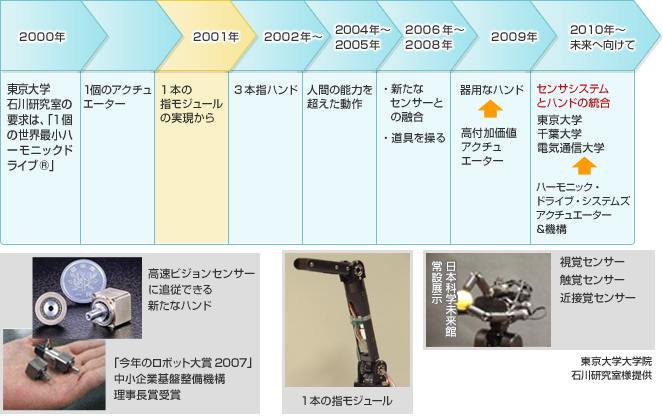
ロボットハンド完成までの歩みと未来へ向けて
連携例
秋田大学、宇部工業高等専門学校、大阪大学、大阪電気通信大学、北九州市立大学、産業技術総合研究所、信州大学、千葉大学、電気通信大学、東京大学、東京理科大学、東北大学、長崎大学、長野工業高等専門学校、名古屋工業大学 他(五十音順)