As a group of technology development-based companies, the HDS Group positions R&D activities as one of our management foundations, seeing the role of R&D as creating compelling products and services that will enrich society. HDSI endeavors to envision the future needs of society and to carry out R&D on that premise, while considering what kinds of contributions we can make.
Industry is always seeking ways of creating new value, and these efforts have driven technological innovation to this day. The new needs sought by industry, however, are not necessarily communicated in a readily understood form. We believe many of the needs are in fact below the radar as latent needs. In order to bring these buried needs to the surface, HDSI considers it important that industry, government, and academia deepen their interactions, with corporations, universities, and public research bodies sharing their respective issues and knowledge, and communicating the results to the rest of the world so as to spark technological innovation. Based on this thinking, HDSI actively pursues ties with universities and public research institutions, establishing new technologies through contacts with the frontiers of research and aiming to provide even more highly innovative motion control.
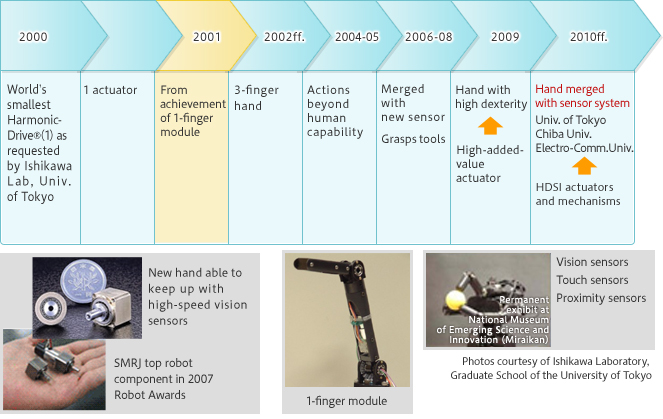
High-speed robot hand research at the University of Tokyo's Ishikawa Laboratory
"It would be great to have a HarmonicDrive® around the size of an adult human finger!"
 The world's smallest at 13mm
The world's smallest at 13mm
HarmonicDrive® CSF-3
In the course of our regular contacts with the University of Tokyo, we learned in 2000 that Prof. Masatoshi Ishikawa was thinking about developing a robot hand with fingers around the same size as adult human fingers. It would have to be easy to control, fast, and powerful. Prof. Ishikawa is widely known for his ultra-high-speed vision sensor development. He was proceeding with research applying this sensor technology to highly responsive motion control.
At the time, our smallest HarmonicDrive® had an external diameter of 20mm, too large for use in a human finger, preventing us from immediately proposing a solution to Prof. Ishikawa's needs. Convinced, however, that his pioneering research would bring about major advances in motion control, and based on the assumption that the future would see growing needs for hand and finger actuators in robotics, we undertook the development of an ultra-compact actuator.
Development of the world's smallest HarmonicDrive® and ultra-compact AC servo motor
In this way development began of a robot hand, but the developers faced continual difficulties as they bumped up against one after another technical obstacle to be overcome. Because of the extremely small size of the parts and gears of the HarmonicDrive® being developed for human-size fingers, the level of technology and skills required for both the processing and measurements was without precedent. With the assistance of Prof. Ishikawa and many other people outside the company, we were able to solve each of the many problems one at a time.
The result of these efforts was the completion of a finger module incorporating the world's smallest HarmonicDrive® at 13mm external diameter along with an ultra-compact AC servo motor and, what at the time was considered to defy common wisdom, bevel gears. We delivered this package to the Ishikawa Laboratory in 2001.
On the way to robot hand completion and toward the future
Collaboration examples
Akita University, Chiba University, Nagano National College of Technology, Nagasaki University, Nagoya Institute of Technology, National Institute of Advanced Industrial Science and Technology (AIST), Osaka Electro-Communication University, Osaka University, Shinshu University, Tohoku University, Tokyo University of Science, University of Electro-Communications, University of Kitakyushu, University of Tokyo, Ube National College of Technology etc.